Camera Simulator
Real-Time Camera and Lidar Simulation
The camera simulator developed by Astos Solutions is an integrated hardware/software solution that provides simulated sensor output of cameras and lidars in real-time. It is intended for closed-loop GNC simulations. HIL simulations with the real sensor in the loop require sensor stimulation that can be quite costly especially when the structural design of the involved vehicle(s) is not yet fixed and mock-ups cannot be built in time or are too expensive to be built.
In earlier design phases, sensor characteristics can be modified to identify their impact on the navigation accuracy and to support the definition of sensor requirements.
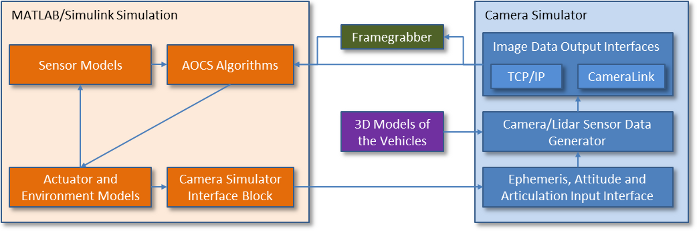
The camera simulator comprises a toolbox for MATLAB/Simulink that can be used to link the Camera Simulator to a GNC simulation model that was built up in the Simulink environment. Ephemeris, attitude and articulations are modeled in Simulink and transmitted to the Camera Simulator via the Camera Simulator interface block. The generated image or Lidar data is provided either via TCP/IP or CameraLink interface or can be also stored as image files. The data output can be returned to the Simulink simulation and can be processed by any implemented navigation algorithms (closed-loop).
3D models of all vehicle components have to be provided as Wavefront OBJ files.
Applications
- Generation of photo-realistic images based on 3D graphics
- Generation of raw depth maps for LIDAR sensor modelling
- Simulation of sensor input in early design phases, when the mechanical design is not yet fixed and satellite mock-up manufacturing is not viable
- Test and development of image processing algorithms and hardware with realistic input data
- Emulation of imaging and LIDAR sensors in real-time closed-loop GNC simulations
- Landing as well as rendezvous and docking simulators
- Generation of AI training data (including ground truth data)
Benefits
- Cost and risk mitigation due to early identification of design errors
- Test of many (virtual) cameras or LIDAR configurations in short time without extra cost
- Easy integration into real-time GNC simulation environments
- Fast generation of hundreds of thousands of AI training data sets
Features
- Support for various sensor types
- Monochrome and colour cameras
- NIR to thermal IR cameras
- Scanning and flash LIDAR
- Photo sensors (e.g. sun sensors, solar arrays)
- Realistic scenario simulation
- Surface materials
- Reflections & shadowing
- Atmospheric scattering
- (Irregular) celestial bodies and star catalogue
- Sunlight, albedo & artifical light sources (HDR)
- Simulation of camera characteristics
- Depth of field
- Amplifier noise
- Defective pixels
- Wavelength spectrum
- Radial distortion
- Scene generation
- Procedural boulder and crater generation with localized size and density distribution
- Bezier mesh refinement for user-provided surface grids
- Artificial multi-layer surface modelling
- Meta-data output
- Distance and time information
- Surface normals
- Artificial scene data (e.g. rock locations and size)
- Meta data can be overlaid or is provided via TCP/IP
- Run-time controllability
- Physical effects
- Camera characteristics
- Scene generation parameters
- Temperature of thermal nodes
- Various operational modes
- Fixed frame rate and triggered image data generation
- Flexible output formats (image/video)
- Trajectory and attitude import as well as real-time trajectory and attitude data interfaces
- Mathworks® Simulink® block for easy interfacing
- Multiple vehicles and articulations
- Rendezvous scenarios
- Robotic arm operations
- Movable solar arrays and radiators
|
