|
|
Re-Entry Vehicle
Vehicle re-entry is basically divided in two main classes:
- Uncontrolled re-entry, i.e. launcher upper stage, manned and unmanned capsule, etc.
- Controlled re-entry: lifting body or control surfaces
The following list of solved problems is not complete, but is intended as an example.
Uncontrolled Re-Entry
Simulation of vehicle re-entry considering 3-6 degree of freedom dynamics.
Flexible definition of the aerodynamic model to meet the customer requests.
- Staging of Vega Zefiro 9: re-entry simulation as a constraint for launcher trajectory
- ATV Jules Verne: verification of the re-entry strategy
- Aero-capture Analysis (interface to Astrium ATPE simulator)
- EXPERT, aerodynamic database impact on 3DoF and 6DoF uncontrolled re-entry
Controlled Re-Entry
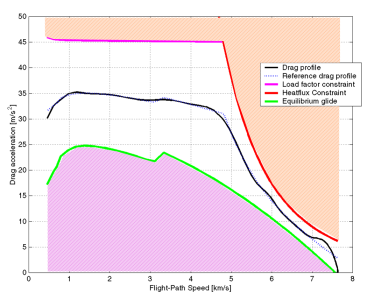
Optimization of the trajectory in consideration of mission and vehicle constraints: TAEM interface, dynamic pressure, max G-loads, heat flux and heat load. A reference trajectory inside the safety corridor can be defined as input for the on-board GNC software.
- NASA X-38 Crew Return Vehicle (CRV): Extensive optimization of X38 reference trajectories. Development of guidance and control algorithms. The developed control algorithm was based on dynamic inversion such that no gain scheduling is needed over the Mach/altitude range. In addition, a neural net was developed assuring robustness of the closed loop system in the presence of uncertain aerodynamics. Even partial actuator failures can be automatically compensated for.
- ExoMars Mars Lander
- IXV, re-entry technology demonstrator
- CAPREE/ATPE: the purpose of these studies was to develop guidance algorithms for low L/D vehicles for direct and skip trajectories to various celestial bodies. Our contribution is a complete analytical solution of the optimization based guidance algorithm where just a linear system of equation needs to be solved onboard. Another innovative guidance algorithm has been developed recently (2008) where both downrange- and cross-range errors are compensated by adaptively adjusting neural nets on board the vehicle. Guidance accuracies are well within the requirements of future CEV's.
- Emergency capsule ejection of Starchaser
- SPHYNX, re-entry vehicle demonstrator
- ARD, Advanced Reentry Demonstrator
- Optimization of the reference trajectory of the German FLPP candidate: Hopper. Optimization of a combined (branched) trajectory to ensure the over all feasibility. Consideration of guidance relevant constraints. Development of TAEM guidance algorithm based on Hopper vehicle.
- USV: support to Italian Cira
|
